El proyecto europeo UNEXMIN, financiado por la UE (Unión Europea), está desarrollando un novedoso robot submarino autónomo para la exploración de las minas abandonadas de Europa, alguna de estas desde hace más de un siglo.
La intención es que la información geológica recopilada por los instrumentos a bordo, junto con los mapas de los túneles reconstruidos por el robot, sean de gran valor para poder decidir si económicamente es viable volver a abrir estas minas.
Se ha podido conocer que el Centro de Automática y Robótica (CAR), un centro de investigación de la UPM (Universidad Politécnica de Madrid) y el CSIC (Consejo Superior de Investigaciones Científicas, agencia estatal española adscrita al Ministerio de Ciencia, Innovación y Universidades), participa en proyecto europeo UNEXMIN.
De acuerdo a un comunicado de prensa de la UPM, solo en Europa existen alrededor de 30 mil sitios mineros cerrados, muchos de los cuales todavía pueden contener cantidades considerables de materias primas valiosas.
Se ha destacado que la región tiene una dependencia casi completa de la importación de materias primas minerales, por lo que hay un fuerte interés en reabrir algunos de estas minas abandonadas de Europa.
“Estas minas ahora están inundadas y la última información de su estado y diseño tiene décadas o incluso más de cien años. El cierre de estas minas suele estar motivado por el coste de la extracción con la tecnología de la época, más que por el agotamiento real de los recursos minerales”.
Entonces, el problema sería que a menudo no se tienen registros detallados de las minas (estructura, localización de los minerales, entre otros), tomando en cuenta que estas características se han perdido o nunca se tuvieron.
Se ha indicado que el confuso diseño de las minas y su complicada geometría hacen que sea imposible realizar cualquier tipo de exploración utilizando equipos convencionales y que además, por razones de seguridad, casi siempre es desaconsejable o, incluso, imposible realizar este tipo de trabajo con buceadores humanos.
Drones en versión submarina
Claudio Rossi, investigador del CAR (UPM-CSIC) que está participando en el proyecto, ha comparado el desarrollo de este robot submarino autónomo con la película Prometeus de Ridley Scott (2012).
“Cuando los exploradores llegan al planeta LV-233 y se adentran en unas extrañas estructuras alienígenas, liberan unos drones esféricos para que estos reconstruyan un mapa de la estructura y detecten su composición y potenciales peligros”.
De esta manera, una vez obtenido un mapa, han podido moverse con más seguridad en la estructura desconocida. “El objetivo del proyecto UNEXMIN es diseñar y realizar estos drones, en su versión submarina”, apuntó el experto del CAR.
Y es que se trata de minas terrestres subterráneas inundadas las extrañas y desconocidas estructuras que los drones de UNEXMIN tendrán que explorar para conocer su estado actual, características y si son potencialmente explotables nuevamente.
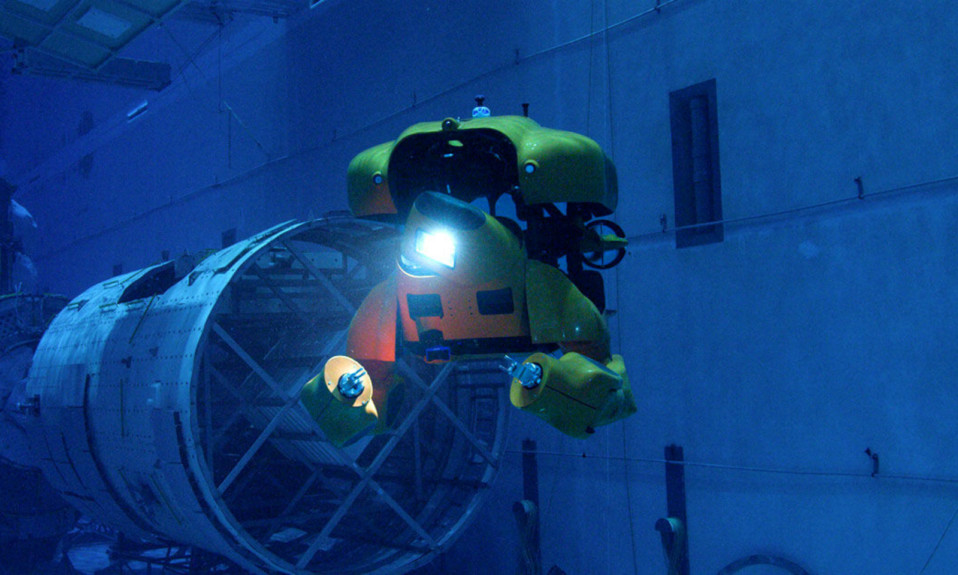
“Robotic Explorer” (UX-1a), precisamente, es el nombre del primer robot submarino autónomo desarrollado en el proyecto, capaz de navegar de forma independiente en los complejos túneles de estas minas. El UX-1a tiene la tarea de reconstruir un mapa de sus estructuras y, a la vez, analizar su composición para detectar la posible presencia de materias primas.
El robot submarino autónomo tiene forma esférica y eso le permite moverse con mayor agilidad y menores riesgos en los túneles, ya que en las minas más antiguas pueden tener tan solo un metro de ancho.
Se ha detallado que el diámetro del UX-1a es de 60 centímetros y que está equipado con un perfilador de fondo para la navegación, una cámara acústica, cinco cámaras digitales y el sistema LIDAR (Laser Imaging Detection and Ranging o Detección y Rango de Imágenes Láser), un dispositivo que permite determinar la distancia desde un emisor láser a un objeto o superficie.
Entre tanto, la instrumentación científica de este robot submarino autónomo se compone de una cámara multiespectral, una unidad de medición de rayos gamma y un sistema de muestreo del agua.
Sistema robótico submarino
Rossi ha explicado que el proyecto se enfrenta a tres desafíos principales desde el punto de vista tecnológico. El primero, es el hecho de construir un robot apto para trabajar en entornos reales (minas abandonadas de Europa) y para profundidades hasta de 500 metros (ya se ha probado en tres minas en Finlandia, Eslovenia y Portugal).
“En segundo lugar, la navegación autónoma en un entorno desconocido, ya que debido al entorno en el que opera no puede haber ningún tipo de comunicación con el exterior. Y, por último, el desarrollo de instrumentación científica ad-hoc para el análisis de información geofísica”.
Hay que agregar que el UX-1a utilizará métodos no invasivos para el mapeo de minas en 3D, con el objetivo de recopilar información geológica y mineralógica valiosa.
Esto, de acuerdo a los responsables del proyecto donde participa el CAR (UPM-CSIC), abrirá nuevos escenarios de exploración para que las decisiones estratégicas sobre la reapertura de las minas abandonadas de Europa puedan ser respaldadas por datos actualizados, que no se pueden obtener de ninguna otra manera.